سلسلة روبوت اللحام



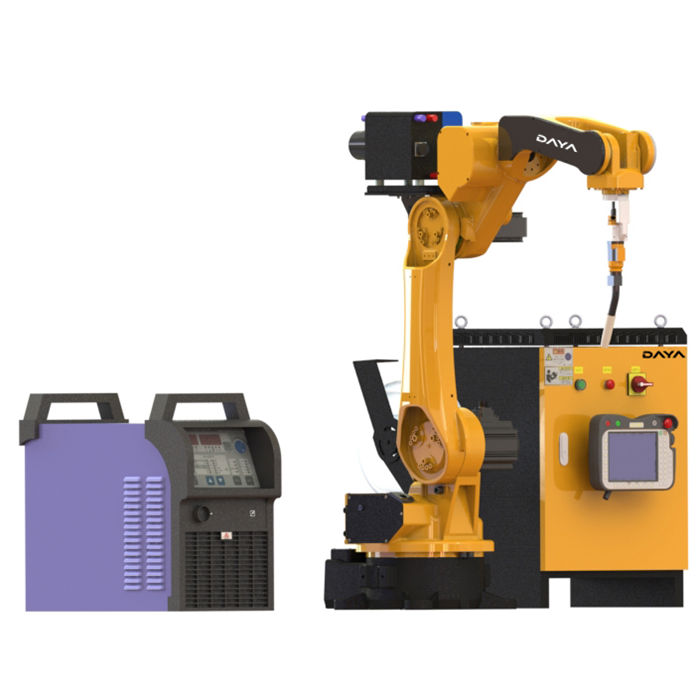
روبوت اللحام

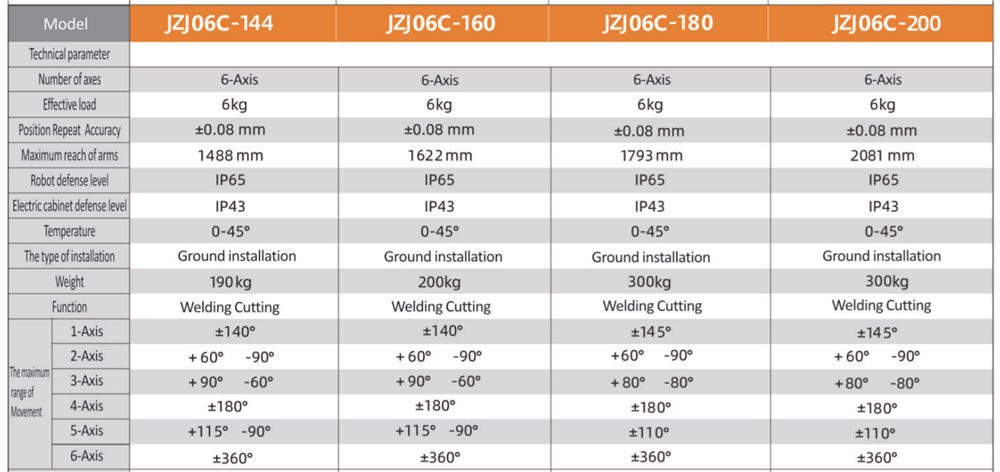
سلسلة روبوت اللحام JZJ06C-180
سلسلة روبوت اللحام JZJ06C-144

سلسلة روبوت اللحام JZJ06C-160

سلسلة روبوت اللحام JZJ06C-200
مقدمة مختصرة
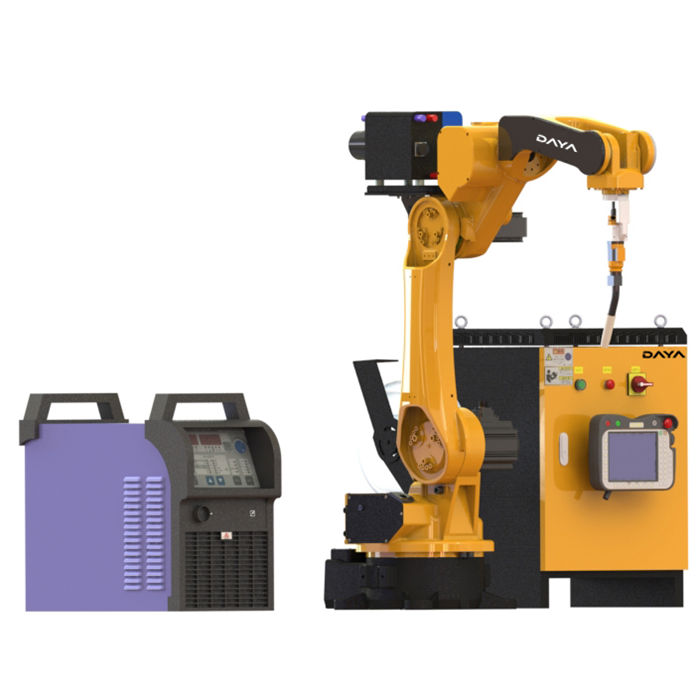
روبوت اللحام هو روبوت صناعي يعمل في اللحام (بما في ذلك القطع والرش). وفقًا لتعريف المنظمة الدولية للتوحيد القياسي (ISO) بأن الروبوت الصناعي ينتمي إلى روبوت اللحام القياسي ، فإن الروبوت الصناعي هو مناول متعدد الأغراض وقابل للبرمجة مع ثلاثة محاور قابلة للبرمجة أو أكثر ، والتي تستخدم في مجال الأتمتة الصناعية من أجل التكيف مع التطبيقات المختلفة ، عادةً ما تكون الواجهة الميكانيكية للمحور الأخير للروبوت عبارة عن شفة متصلة ، والتي يمكن توصيلها بأدوات مختلفة أو مؤثرات نهاية. يقوم روبوت اللحام بتركيب ملقط اللحام أو مسدس اللحام (القطع) على حافة نهاية العمود للروبوت الصناعي ، بحيث يمكنه إجراء اللحام أو القطع أو الرش الحراري.
اللحام الآلي هو استخدام أدوات ميكانيكية قابلة للبرمجة (روبوتات) ، والتي تعمل على أتمتة عملية اللحام بالكامل من خلال إجراء اللحام والتعامل مع الجزء. العمليات مثل اللحام بالقوس المعدني بالغاز ، رغم أنها غالبًا ما تكون مؤتمتة ، لا تكافئ بالضرورة اللحام الآلي ، لأن المشغل البشري يقوم أحيانًا بإعداد المواد ليتم لحامها. يشيع استخدام اللحام الآلي في لحام البقعة المقاومة ولحام القوس في تطبيقات الإنتاج العالية ، مثل صناعة السيارات.
يعد اللحام الآلي تطبيقًا جديدًا نسبيًا للروبوتات ، على الرغم من إدخال الروبوتات لأول مرة في الصناعة الأمريكية خلال الستينيات. لم يتم استخدام الروبوتات في اللحام حتى الثمانينيات ، عندما بدأت صناعة السيارات في استخدام الروبوتات على نطاق واسع في اللحام النقطي. منذ ذلك الحين ، نما عدد الروبوتات المستخدمة في الصناعة وعدد تطبيقاتها بشكل كبير. في عام 2005 ، تم استخدام أكثر من 120.000 روبوت في صناعة أمريكا الشمالية ، نصفهم تقريبًا في اللحام. [1] النمو محدود في المقام الأول بسبب ارتفاع تكاليف المعدات ، والقيود الناتجة عن التطبيقات عالية الإنتاج.
بدأ اللحام بالقوس الآلي في النمو بسرعة مؤخرًا ، وهو يستحوذ بالفعل على حوالي 20 ٪ من تطبيقات الروبوت الصناعي المكونات الرئيسية لروبوتات اللحام بالقوس الكهربائي هي المناور أو الوحدة الميكانيكية ووحدة التحكم ، والتي تعمل بمثابة "دماغ" الروبوت. المناور هو ما يجعل الروبوت يتحرك ، ويمكن تصنيف تصميم هذه الأنظمة إلى عدة أنواع شائعة ، مثل SCARA وروبوت الإحداثيات الديكارتية ، والتي تستخدم أنظمة إحداثيات مختلفة لتوجيه أذرع الآلة.
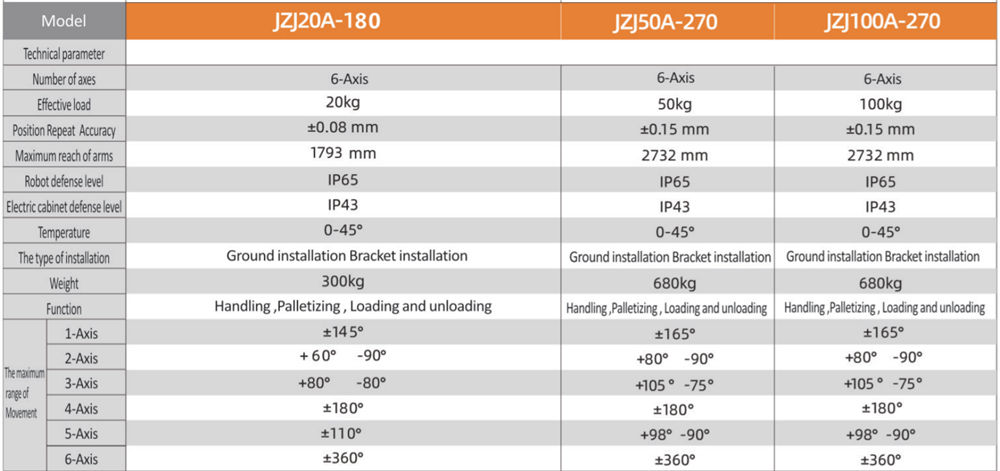
المعلمات الفنية لسلسلة روبوت اللحام